
随着空间科学技术研究的不断深入,基于外部物理场的悬浮操控技术已经日臻完善,通过模拟太空微重力环境,实现了对不同类型和尺度样品的非接触式捕获及驱动,因此,在生命科学,分析化学,纳米工程和先进制造等领域展现了广阔的应用前景。具体而言,基于光场,磁场,静电场和流体动力场的悬浮技术近年来发展迅速,但是仪器设备庞大繁杂,并且对操控对象的材料特性有严格的限制。超声悬浮操控技术(又称声镊)的出现,极大地扩展了操控对象的范围,可在1 kHz to 500 MHz频率范围内实现对纳米到厘米级不同物质的悬浮。此外,声学超材料可将稳态声场调制成更加复杂的形式用于悬浮操控,但是针对悬浮对象的动态调整以及控制仍然面临诸多挑战。超声换能器相位阵列(PAT)技术的出现,为解决这一问题提供了可能,然而大量换能器的引入又增加了系统的控制难度,在实际应用中不利于使用和推广。
在德国洪堡奖学金和国家自然科学基金的支持下,机械结构力学及控制国家重点实验室芦小龙副教授(第一作者,共同通讯作者)与德国马克斯普朗克智能系统研究所和莱布尼兹汉诺威大学两家科研单位合作,在动态声悬浮操控技术方面取得了突破,近期以“基于亚波长微孔的动态声悬浮操控平台”为题的一篇研究文章发表于国际著名期刊《Advanced Science》(影响因子15.84)。
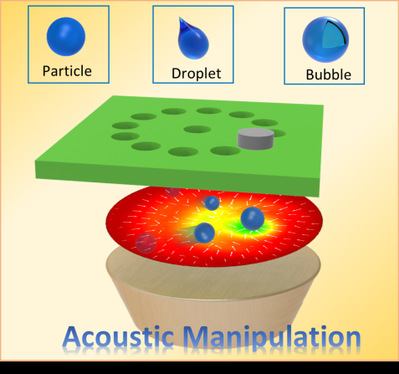
基于亚波长微孔的动态声悬浮操控技术
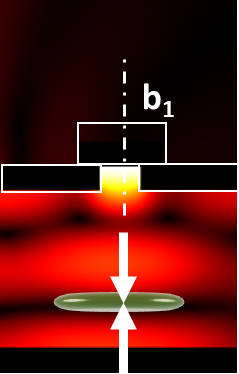
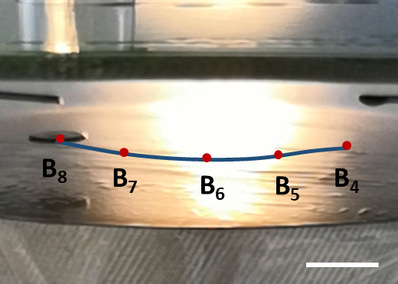
本研究通过在声反射板上设置亚波长微孔,可实现对悬浮物质的动态机械操控。该方式免除了PAT技术对大量超声换能器和复杂电路控制系统的依赖,仅利用单一的超声换能器,通过对声反射板上的微孔进行完全或者局部开合控制,即可将传统的单一驻波稳态声场调制成动态操控声场。利用亚波长微孔的开合可以产生时变的Gor’kov声势,进而实现对操控对象的长距离快速输运,原位转动和自适应低频振动等功能,从而避免了对外部物理场进一步调节悬浮物质运动的需求。本研究提出的动态声操控技术应用对象不局限于固体微颗粒,对液滴以及气泡也具有良好的动态操控效果。与PAT技术相比较,基于亚波长微孔的动态声操控技术虽然在系统集成度方面具有较大的优势,但是在操控速度上受本身工作原理的限制,目前极限的操控运动速度上限为10mm/s。此外,需要针对操控的具体需求,在声反射板上预先设计并加工亚波长微孔的结构,这也是未来该技术进一步提升其操控灵活性的制约因素之一。但是,简洁,低成本和易操控的优势使得该技术在面向太空环境下的生物材料合成与制备,晶体生长和非接触式3D打印等前沿领域研究中依然具有独特的优势,因此,未来的应用空间十分广阔。
论文全文链接:https://onlinelibrary.wiley.com/doi/full/10.1002/advs.202100888


